
EQUIPMENT
In the daily research activities that we perform in our laboratory, we employ diverse research pieces of equipment some of which is unique in Canada. This page contains some of our most utilized infrastructure:
UAVs: 4 Underwater vehicles: 2 UGVs: 5 Humanoid Robots: 3


Humanoid Robots:
-
Thormang 3.0: life-size humanoid robot (from ROBOTIS) with a total of 28 DOF
-
NAO: small size humanoid robot (from Aldebaran Robotics) with a total of 18 DOF.
-
Transcend: a custom life-size (5.5 feet tall) humanoid robot: Under development.

Unmanned Aerial Vehicles:

-
Yamaha L15 RMAX Type IIG: an autonomous helicopter with redundant autopilot.
-
Navig8: Highly maneuverable tiltrotor ducted fan UAV with pitch-hover capabilities.
-
Benzine Trainer: gas powered Trainer helicopter from Vario modified as a UAV.
-
DJI Quadcopter: Equipped with VPR.
-
Convergence: Transitional (VTOL + fixed-wing) aircraft.
-
An MX-450 small RC helicopter: from Heli-Max for flying training purposes.
Unmanned Ground Vehicles:



-
An insect-like hexapod: mobile robot (with a total of 18 DOF)
-
1 omnidirectional UGV: mobile platform with Transwheels
-
Formic: A custom all-terrain hybrid multi-legged robot (under development)
-
A GAIA-2 rugged UGV: indoor/outdoor autonomous mobile robot.
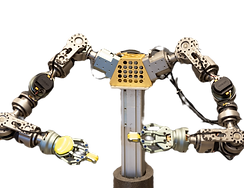
Robot arms + related equipment:
-
A two-arm torso with 6 DoF per arm.
-
A harmonic 5 DOF arm.
-
A reconfigurable self-adaptive under-actuated robot hand.
-
A 2-finger robot hand for in-hand manipulation.

Underwater and surface vehicles:



-
Video Ray: Underwater Sub.
-
A highly maneuverable UUV: Under development.
-
A Kingfisher: autonomous surface vehicle from Clearpath Robotics.
Other equipment (e.g., sensors, etc):
-
A Cyborg evo joystick: with auto-calibration features
-
Artificial Skin: for robot-human interaction research.
-
Velodyne Lidar sensors.
-
CMUcam2 CCD video cameras
-
Eyecam 2.4GHz color wireless video camera & articulated mount
-
Diverse sensor packages: GPS system module, encoders, micro gyros, sonars, cameras, etc.
